ARDUINO UNO & TMC5130 & NEMA17 0.9 Grad & THK KR2001A
Verfasst: 1. Aug 2019, 09:57
Hallo zusammen,
da ich erfahren habe, dass die TMC-Schrittmotorentreiber hervorragend sein sollen,
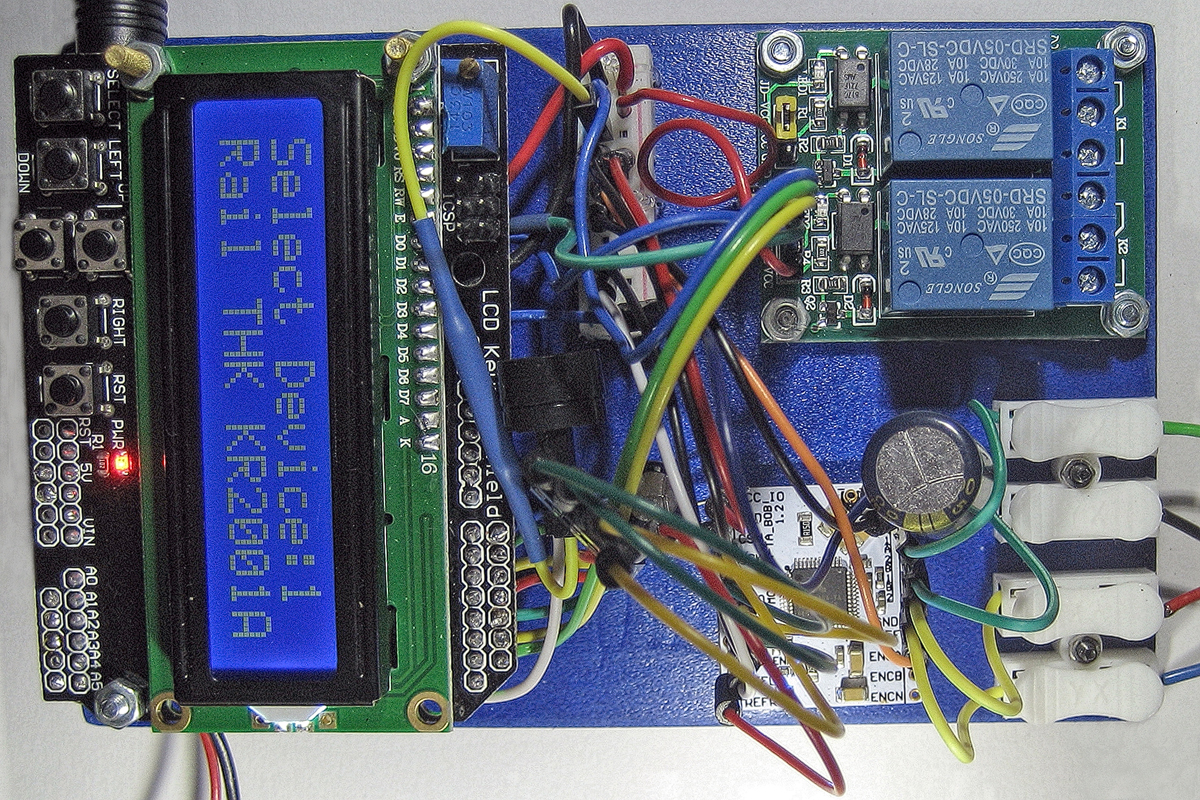
habe ich mir einen Kontroller mit deren Spitzenreiter 5130 gebaut.
So sieht er aus:
Und so sieht der Schaltplan aus:
Da der Treiber programmierbar ist, muss man erst herausfinden, welche Einstellungen optimal sind.
Bei den folgenden Einstellungen, verhält sich mein Schlitten, wie folgt:
Ich habe mit Absicht den Schritt 1 Mikrometer getestet, weil er zu meinem Mitutoyo 20x / 0.42 benötigt wird (3 Fotos innerhalb der Schärfentiefe).
Für die höheren Aperturen habe ich bereits einen Schlitten, der mit Getriebe 100:1 läuft.
Nur aus Neugier werde ich aber auch den THK-Schlitten mit kleineren Schritten testen.
Erst muss ich aber die optimalen Settings herausfinden
Danke und Gruß,
ADi
da ich erfahren habe, dass die TMC-Schrittmotorentreiber hervorragend sein sollen,
habe ich mir einen Kontroller mit deren Spitzenreiter 5130 gebaut.
So sieht er aus:
Und so sieht der Schaltplan aus:
- UNO_TMC5130_wires_1200.jpg (263.42 KiB) 2454 mal betrachtet
Da der Treiber programmierbar ist, muss man erst herausfinden, welche Einstellungen optimal sind.
Bei den folgenden Einstellungen, verhält sich mein Schlitten, wie folgt:
Code: Alles auswählen
tmcSendData(0x80,0x00000000); //GCONF
tmcSendData(0xEC,0x000101D5); //CHOPCONF: TOFF=5, HSTRT=5, HEND=3, TBL=2, CHM=0 (spreadcycle)
tmcSendData(0x90,0x00070603); //IHOLD_IRUN: IHOLD=3, IRUN=10 (max.current), IHOLDDELAY=6
tmcSendData(0x91,0x0000000A); //TPOWERDOWN=10
tmcSendData(0xF0,0x00000000); // PWMCONF
tmcSendData(0xA4,0x000003E8); //A1=1000
tmcSendData(0xA5,0x000186A0); //V1=100000
tmcSendData(0xA6,0x0000C350); //AMAX=50000
tmcSendData(0xA7,0x000186A0); //VMAX=100000
tmcSendData(0xAA,0x00000578); //D1=1400
tmcSendData(0xAB,0x0000000A); //VSTOP=10
tmcSendData(0xA0,0x00000000); //RAMPMODE=0
- 1_micron.jpg (114.14 KiB) 2454 mal betrachtet
Ich habe mit Absicht den Schritt 1 Mikrometer getestet, weil er zu meinem Mitutoyo 20x / 0.42 benötigt wird (3 Fotos innerhalb der Schärfentiefe).
Für die höheren Aperturen habe ich bereits einen Schlitten, der mit Getriebe 100:1 läuft.
Nur aus Neugier werde ich aber auch den THK-Schlitten mit kleineren Schritten testen.
- THK_KR2001A_1200.jpg (467.39 KiB) 2445 mal betrachtet
Erst muss ich aber die optimalen Settings herausfinden
Danke und Gruß,
ADi

